
Schneehöhensensor für Wetterstationen
© 2006 Helmut Bayerlein, dc3yc [at] darc [.] de
Ziel dieser Entwicklung war, den Schneehöhensensorteil des Nässesensors preiswerter zu gestalten. Ein Selbstbau des Ultraschallteils lohnt nicht, denn mittlerweilen gibt es von der Fa. Parallax für Roboterzwecke einen passenden Distanzmesser namens PING))), der ein pulsbreitenmoduliertes Signal mit einem Messbereich von bis zu 3m ausgibt. Die erreichte Auflösung liegt im Millimeterbereich und ist hiermit für diese Aufgabe auch brauchbar. Die Ansteuerung geschieht, wie bei meinen anderen Sensoren, mit einem ATMEL AT89C4051. Dieser führt auch die Messwertaufbereitung sowie die Distanzkorrektur durch. Desweiteren ist ein Nässesensor anschließbar, wie bei der älteren Version beschrieben.
Um springende Messwerte oder einmalige Ausreißer zu unterdrücken, wurde noch
eine softwaremäßige Glättung vorgesehen. Es ist ein Glättungsintervall von 10
Messungen (d.h. 30 Minuten) per Jumper zuschaltbar.
Als Schneehöhensensor möchte man ja nicht den Abstand des Sensors vom Boden
wissen, sondern die tatsächliche Schneehöhe. Deswegen ist ein Differenzmode
implementiert, der vom Messwert einen Offset von einem bzw. zwei Metern abzieht,
sodass die Schneehöhe direkt abgelesen werden kann, wenn der Sensor direkt im
Abstand von einem bzw. zwei Metern vom Boden montiert wird.
Als Funkprotokoll wird das ThermoHygro-Protokoll verwendet, sodass pro cm
Schneehöhe 0.1° angezeigt werden. Der Feuchtewert ist für die Übertragung der
Nässezeit reserviert. Hier wird pro 30 Sekunden Nässe jeweils 10% rH aufaddiert.
Die Spannungsversorgung der Elektronik beträgt 5Volt bei einem Stromverbrauch von ca. 30mA, sodass eine Speisung aus Batterien nicht mehr in Frage kommt. Deswegen wurde eine Stabilisierung mit eingebaut, sodass die Schaltung mit 7V..12V versorgt werden kann.
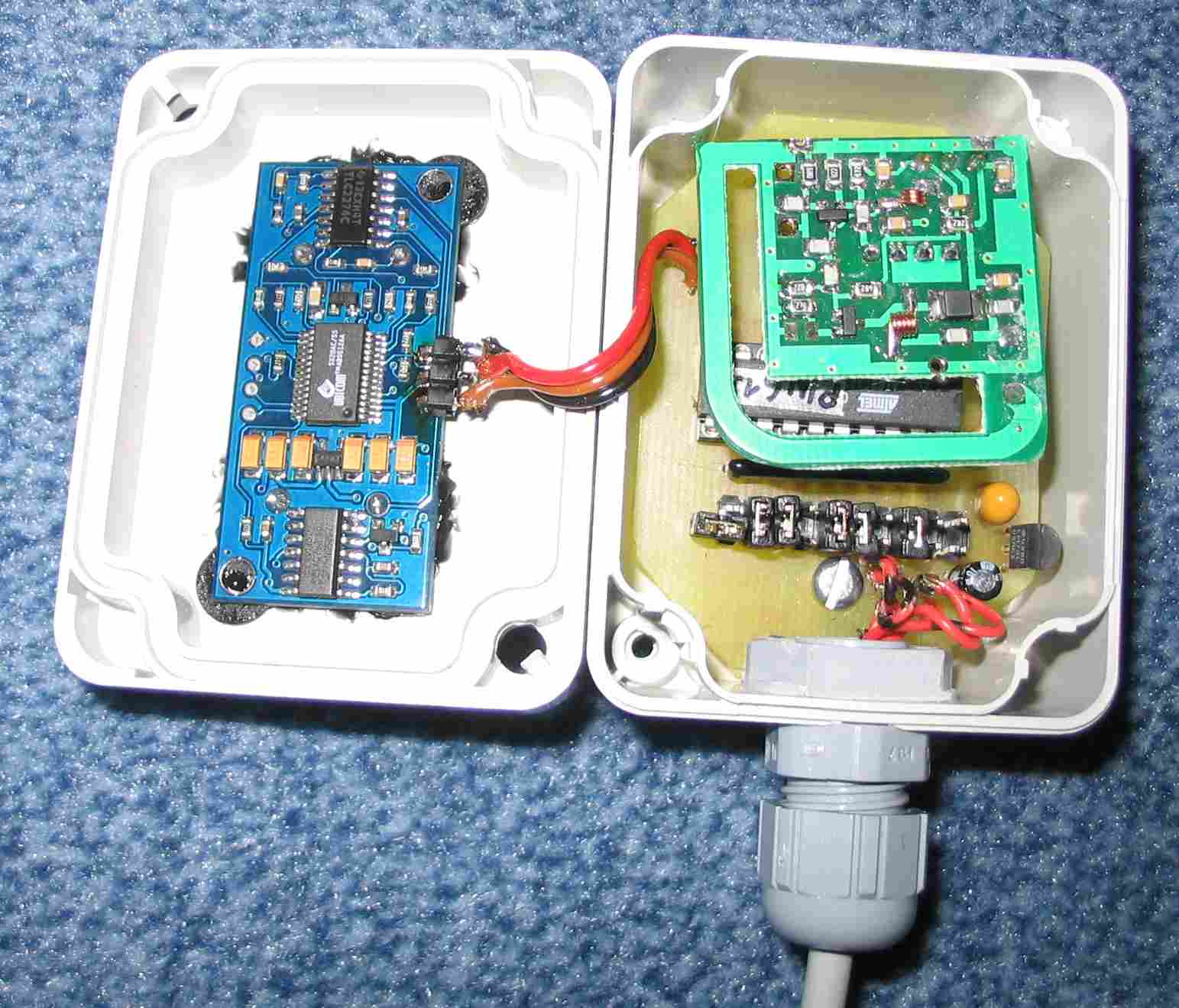
Das Bild zeigt links den PING))), rechts ist der Prozessor und die restliche Schaltung unter dem 433MHz-Sendemodul zu sehen.
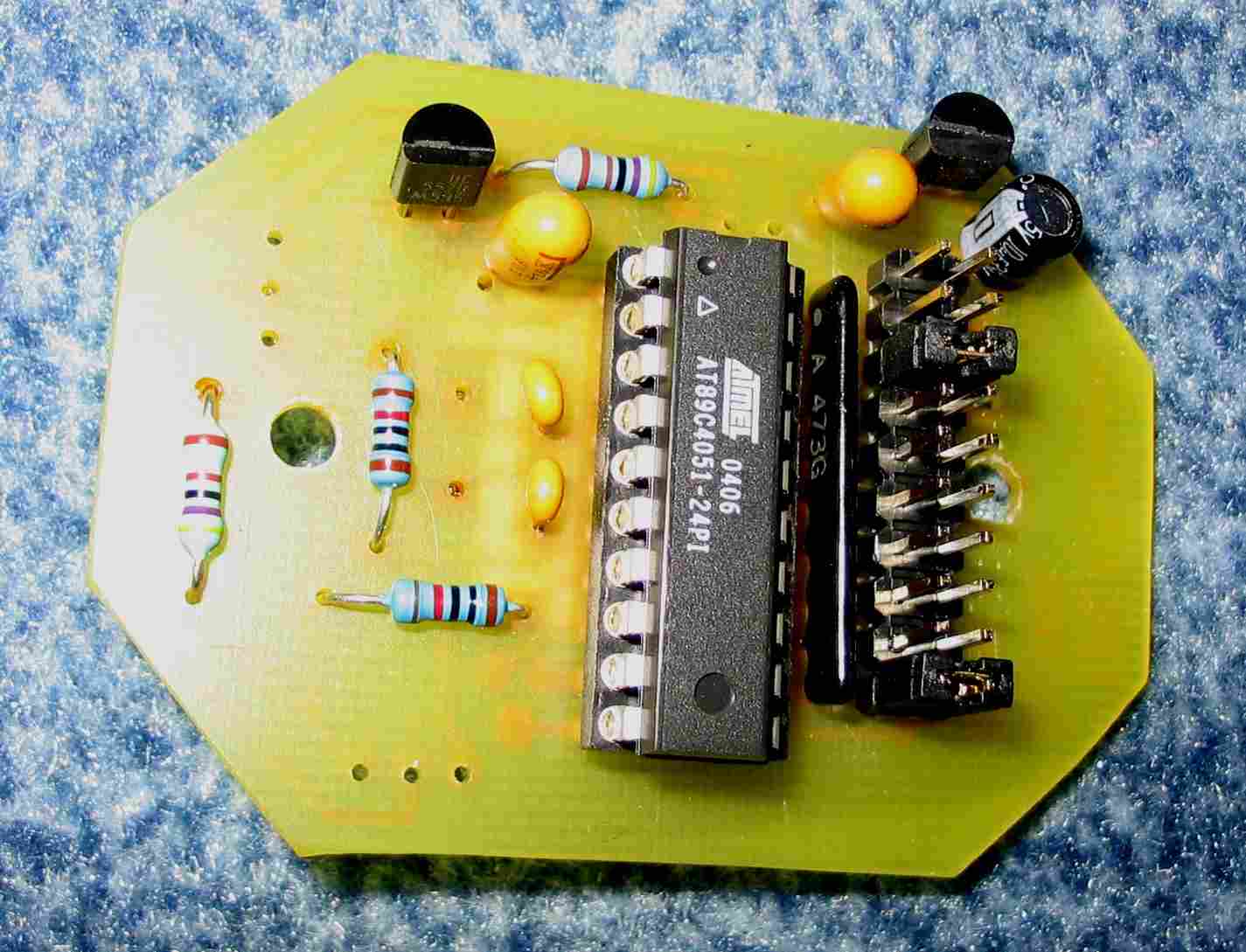
Der Quarz ist auf der Unterseite montiert, sodass nur wenige Bauteile auf der Elektronikleiterplatte zu sehen sind:
Das Schaltbild ist deswegen auch nicht sehr aufregend:
Das Layout für ein kleines wasserdichtes Bopla-Gehäuse:
Wegen Leiterplatten, programmierten Prozessoren oder Programmmodifikationen bitte
wie immer eine EMail
an dc3yc [at] darc
[.] de senden!
Noch ein Hinweis zu den Jumpern:
Die Adresse des Sensors wird an K3 eingestellt. Wenn mittels Jumper alle drei
Kontakte überbrückt werden, ist Adresse 0 eingestellt. Bei drei offenen
Kontakten sendet der Sensor mit Adresse 7. Das niederwertige Bit (K3 Pin 1 und
2) ist auf Port P1.0 geführt (Prozessorpin 12); das höchstwertige Bit (K3 Pin 5
und 6) auf Port P1.2 (Pin 14). Ein gesteckter Jumper bedeutet Low-Pegel.
Weiterhin lassen sich noch einstellen:
Mittelwertbildung über 10 Messwerte bei gestecktem Jumper MEAN
Differenzmode (Schneehöhe mit 1m bzw. 2m Offset): Jumper RAW/Sub gesteckt,
offen: Rohdaten
Offset für Differenzmode 1m (Jumper 1m/2m gesteckt) oder 2m (Jumper
1m/2m offen)
Jumper TEST gesteckt: Senden von Messwerten ca. alle 5-10s
Springe zur Sensorübersicht.